Goal
In this tutorial you will learn how to:
Theory
What is an Affine Transformation?
- A transformation that can be expressed in the form of a matrix multiplication (linear transformation) followed by a vector addition (translation).
From the above, we can use an Affine Transformation to express:
- Rotations (linear transformation)
- Translations (vector addition)
- Scale operations (linear transformation)
you can see that, in essence, an Affine Transformation represents a relation between two images.
The usual way to represent an Affine Transformation is by using a \(2 \times 3\) matrix.
\[ A = \begin{bmatrix} a_{00} & a_{01} \\ a_{10} & a_{11} \end{bmatrix}_{2 \times 2} B = \begin{bmatrix} b_{00} \\ b_{10} \end{bmatrix}_{2 \times 1} \]
\[ M = \begin{bmatrix} A & B \end{bmatrix} = \begin{bmatrix} a_{00} & a_{01} & b_{00} \\ a_{10} & a_{11} & b_{10} \end{bmatrix}_{2 \times 3} \]
Considering that we want to transform a 2D vector \(X = \begin{bmatrix}x \\ y\end{bmatrix}\) by using \(A\) and \(B\), we can do the same with:
\(T = A \cdot \begin{bmatrix}x \\ y\end{bmatrix} + B\) or \(T = M \cdot [x, y, 1]^{T}\)
\[T = \begin{bmatrix} a_{00}x + a_{01}y + b_{00} \\ a_{10}x + a_{11}y + b_{10} \end{bmatrix}\]
How do we get an Affine Transformation?
- We mentioned that an Affine Transformation is basically a relation between two images. The information about this relation can come, roughly, in two ways:
- We know both \(X\) and T and we also know that they are related. Then our task is to find \(M\)
- We know \(M\) and \(X\). To obtain \(T\) we only need to apply \(T = M \cdot X\). Our information for \(M\) may be explicit (i.e. have the 2-by-3 matrix) or it can come as a geometric relation between points.
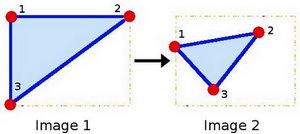
Let's explain this in a better way (b). Since \(M\) relates 2 images, we can analyze the simplest case in which it relates three points in both images. Look at the figure below:
the points 1, 2 and 3 (forming a triangle in image 1) are mapped into image 2, still forming a triangle, but now they have changed notoriously. If we find the Affine Transformation with these 3 points (you can choose them as you like), then we can apply this found relation to all the pixels in an image.
Code
- What does this program do?
- Loads an image
- Applies an Affine Transform to the image. This transform is obtained from the relation between three points. We use the function cv::warpAffine for that purpose.
- Applies a Rotation to the image after being transformed. This rotation is with respect to the image center
- Waits until the user exits the program
- The tutorial's code is shown below. You can also download it here here
#include <iostream>
const char* source_window = "Source image";
const char* warp_window = "Warp";
const char* warp_rotate_window = "Warp + Rotate";
int main( int, char** argv )
{
Mat src, warp_dst, warp_rotate_dst;
double angle = -50.0;
double scale = 0.6;
imshow( warp_window, warp_dst );
imshow( warp_rotate_window, warp_rotate_dst );
return 0;
}
Explanation
- Declare some variables we will use, such as the matrices to store our results and 2 arrays of points to store the 2D points that define our Affine Transform.
Mat src, warp_dst, warp_rotate_dst;
- Load an image:
- Initialize the destination image as having the same size and type as the source:
warp_dst = Mat::zeros( src.rows, src.cols, src.type() );
- Affine Transform: As we explained in lines above, we need two sets of 3 points to derive the affine transform relation. Have a look:
srcTri[1] =
Point2f( src.cols - 1, 0 );
srcTri[2] =
Point2f( 0, src.rows - 1 );
dstTri[0] =
Point2f( src.cols*0.0, src.rows*0.33 );
dstTri[1] =
Point2f( src.cols*0.85, src.rows*0.25 );
dstTri[2] =
Point2f( src.cols*0.15, src.rows*0.7 );
- Armed with both sets of points, we calculate the Affine Transform by using OpenCV function cv::getAffineTransform : We get a \(2 \times 3\) matrix as an output (in this case warp_mat)
We then apply the Affine Transform just found to the src image
warpAffine( src, warp_dst, warp_mat, warp_dst.size() );
with the following arguments:
- src: Input image
- warp_dst: Output image
- warp_mat: Affine transform
- warp_dst.size(): The desired size of the output image
We just got our first transformed image! We will display it in one bit. Before that, we also want to rotate it...
Rotate: To rotate an image, we need to know two things:
- The center with respect to which the image will rotate
- The angle to be rotated. In OpenCV a positive angle is counter-clockwise
- Optional: A scale factor
We define these parameters with the following snippet:
Point center =
Point( warp_dst.cols/2, warp_dst.rows/2 );
double angle = -50.0;
double scale = 0.6;
- We generate the rotation matrix with the OpenCV function cv::getRotationMatrix2D , which returns a \(2 \times 3\) matrix (in this case rot_mat)
- We now apply the found rotation to the output of our previous Transformation.
warpAffine( warp_dst, warp_rotate_dst, rot_mat, warp_dst.size() );
- Finally, we display our results in two windows plus the original image for good measure:
imshow( warp_window, warp_dst );
imshow( warp_rotate_window, warp_rotate_dst );
- We just have to wait until the user exits the program
Result
After compiling the code above, we can give it the path of an image as argument. For instance, for a picture like:
after applying the first Affine Transform we obtain:
and finally, after applying a negative rotation (remember negative means clockwise) and a scale factor, we get:


 1.8.13
1.8.13